
اسکلتهای بیرونی پوشیدنی هنوز وسایل سنگین و حجیمی هستند که به طور کلی نیاز به نظارت (معمولاً از سوی کارکنان بالینی) و استفاده از وسایل کمکی راه رفتن (مانند عصا و واکر) دارند. بیشتر اسکلتهای بیرونی از الگوریتمهای تشخیص فاز راه رفتن استفاده میکنند. در مورد محرک، متداولترین محرکها موتورهای الکتریکی هستند، احتمالاً به این دلیل که کنترل آنها آسان است و دقت بسیار با توان بالا دارند.
روشهای کنترلی مبتنی بر مسیرهای از پیش تعریفشده نخستین روشهایی بودند که در اسکلتهای بیرونی پوشیدنی پیادهسازی شدند. با این وجود، روشهای کنترل مبتنی بر تعامل کاربر و اسکلت بیرونی، که نیازمند مشارکت فعالتر کاربر است، برای اهداف توانبخشی رایجتر شدند. از جنبه ارگونومیکی، ساختارهای مکانیکی پیچیده، زمان پوشیدن و درآوردن اسکلت بیرونی را افزایش میدهند که از ۱۰ تا ۳۰ دقیقه متغیر است. افزون بر این، ناهماهنگی مفاصل هنوز در اسکلتهای بیرونی فعلی یک مسئله است، که ممکن است هزینه متابولیک و ناراحتی کاربر را افزایش دهد و حتی میتواند موجب ساییدگی پوست، زخم و افزایش خطر شکستگی شود.
اسکلتهای بیرونی پوشیدنی باید به سمت سیستمهای مدولار پیشرفت کنند تا قادر به انطباق با قابلیتها و محدودیتهای حرکتی کاربر باشند. به همین ترتیب، روشهای کنترل باید بر اساس الگوریتمهای کمک در صورت نیاز باشند تا به راحتی تحریک را با نیازهای کاربر و بر اساس فرآیند توانبخشی تطبیق دهند.
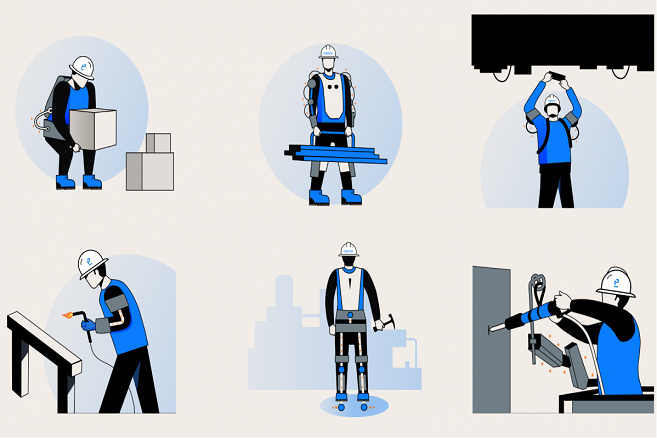
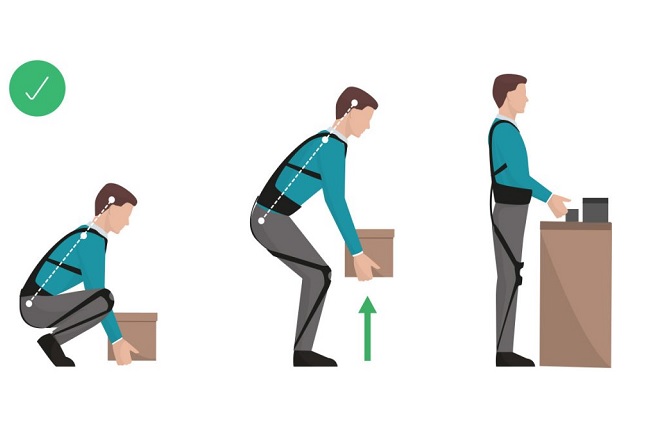
فناوریهای عصبی نقش مهمی در نسل آینده اسکلتهای بیرونی پوشیدنی دارند. رابطهای ماشین و مغز (BMI) امکان کنترل مستقیم و اختیاری دستگاهها را بدون توجه به قابلیتهای کاربر فراهم میکند که این موضوع کنترل اسکلتهای بیرونی را بهبود میدهد. اسکلت بیرونی پوشیدنی برای استفاده به عنوان ابزار کمکی در فعالیتهای زندگی روزمره مانند بالا رفتن از پلهها، راه رفتن روی سطوح مختلف، ورود به اتومبیل و گام برداشتن به طرفین استفاده میشود. با این حال، این توابع به طور ضعیفی توسط اسکلتهای بیرونی فعلی پوشش داده شده است.
در نهایت، هزینه اسکلتهای بیرونی پوشیدنی برای استفاده شخصی باید کاهش یابد، زیرا هزینههای فعلی آنها هنوز برای افراد گران است. در واقع، بیشتر کاربران اگر مشکل هزینه دستگاه نباشد، مایلند اسکلت بیرونی را به خانه ببرند.